

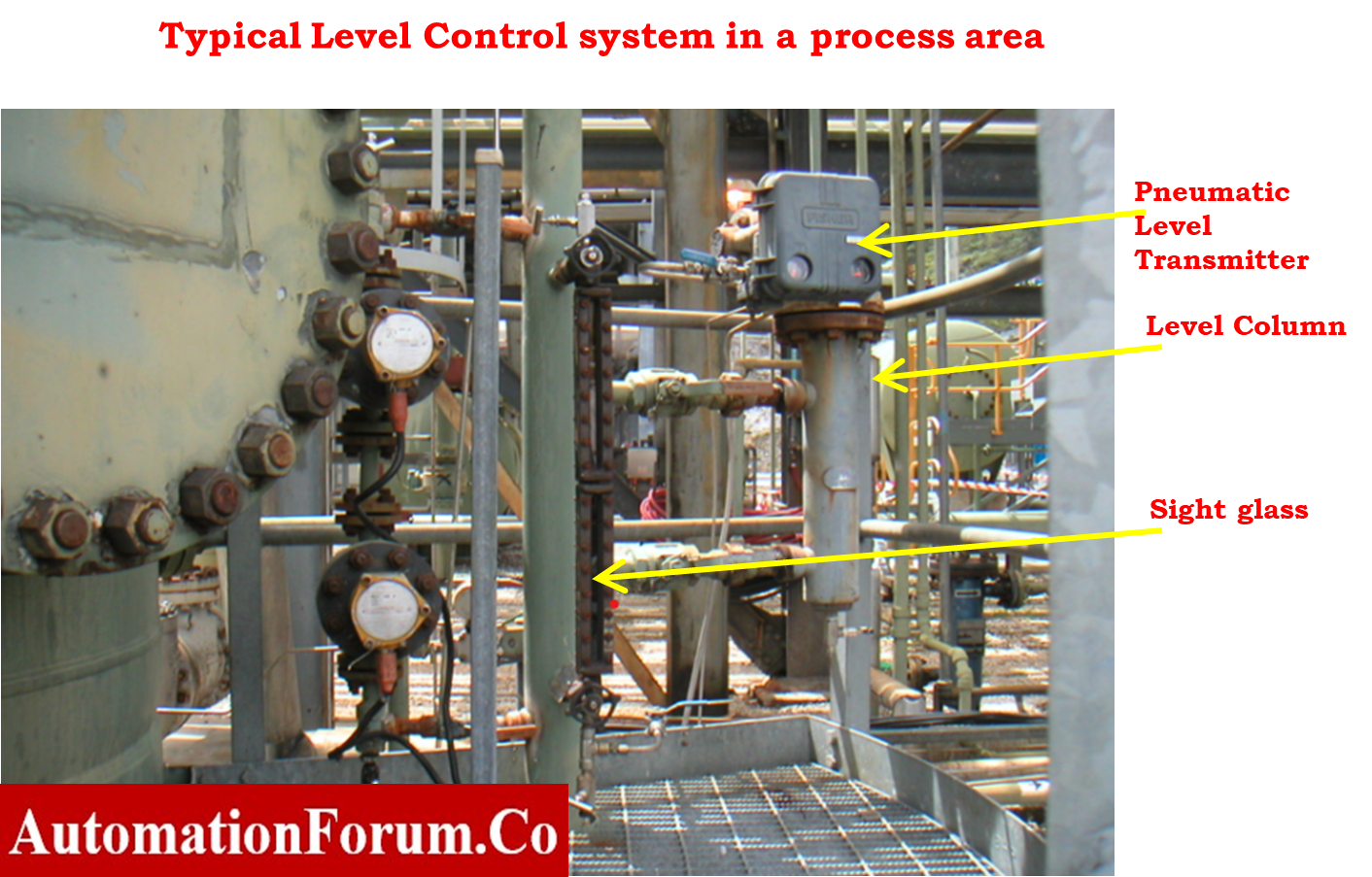
一个位移电平变送器包括位移元件,该位移元件挂在带有连接到发射机头的扭矩管的吊架上。吊架和转矩管都连接到发射机头上。
位移元件的设计和制造要比使用它的液体重。这可以确保即使在悬挂器完全浸入液体中之后,位移元件仍将继续对悬挂器施加向下的力。
控制器和变送器的校准可以在现场进行,在现场将控制器和变送器安装在装有过程流体的容器上。也可以在车间内进行该程序;然而,必须给出另一种实现位移力变化的方法。修改校准的方法可以使用湿法或干法来完成。在大多数情况下,干燥技术是在车间使用既定的参考重量进行的。
目的和范围:
本程序提供校准说明位移式液位变送器/控制器在车间用标准参考砝码校准。
校准所需工具:
- 必备的手工工具。
- 万用表。
- 哈特通信器手持可配置通信器,如果它是电子智能发射机。
- 3至15 psi测量压力表的信号,用于监测输出,如果是气动液位控制器/变送器
- 清洁用软布。
校准的设置

年代afety
- 有关基本安全和一般规则,以及过程工业中校准操作的信息,请参阅下面提供的链接。
- 要求面板操作员将控制回路控制器设置为手动模式,将ESD回路控制器设置为MOS模式。
- 连接HART通信器,然后通过查阅数据页检查一些设置。标签数、PV、LRV和URV是典型的指标。
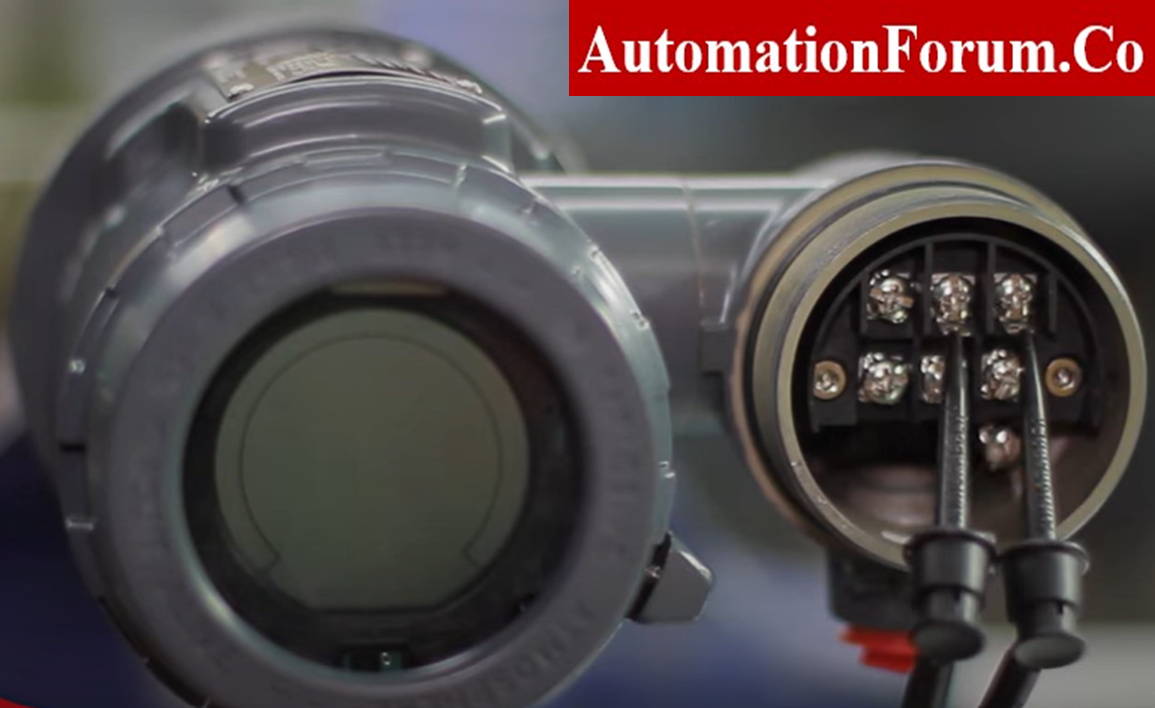
- 将仪器与操作分开。
- 将控制器/变送器和扭矩管臂作为一个单元从笼或容器中取出。

校准程序工作台
什么是干式校准?
这些校准程序需要从特定的工艺变量输入到传感器,通过从顶替杆的末端悬挂适当的重量来模拟工艺变量。
这将允许传感器在不需要特定过程变量的情况下进行校准。
在继续进行校准方法之前,请确保已完成控制器/变送器和扭矩管臂拆卸以及确定悬浮重量的数量程序。
控制器/变送器以及扭矩管臂的拆卸
- 请参阅说明书,以帮助从驱油杆上拆卸驱油器或从笼或容器上拆卸控制器/变送器和扭矩管臂。
- 根据传感器的类型,有不同的方法可以取下位移器或扭矩管臂以及连接到它的控制器或变送器。
- 对于顶部有平衡连接的笼状传感器,在将其拆开之前,最好将整个笼状传感器从容器中取出。
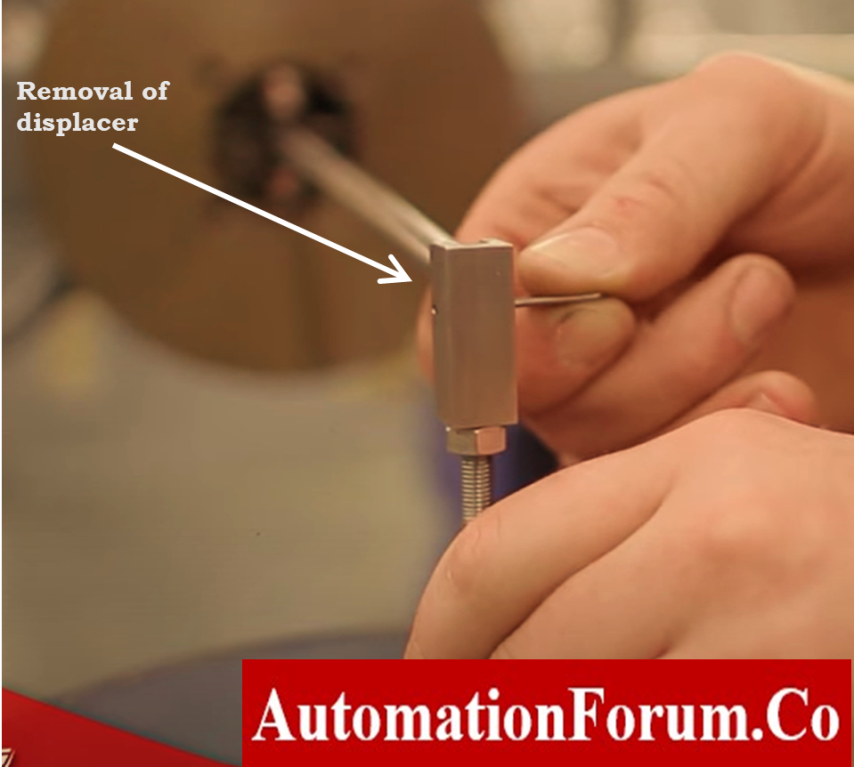
- 如果在传感器组件从笼或容器中取出之前,需要将驱油器从驱油杆上取下,则需要有一种方法来固定驱油器,使其不会掉落和损坏。
- 在每一个驱油器上,阀杆或阀杆端部都有可以插入杆或其他支撑物的孔。
- 一些带有长位移器的顶部安装传感器可以通过传感器头部的访问孔取下。
- 对于带有行程止动器的传感器,只要行程止动板到位且传感器头在正确的位置,杆端件引脚就会将位移器固定在行程止动器上。
确定吊重:
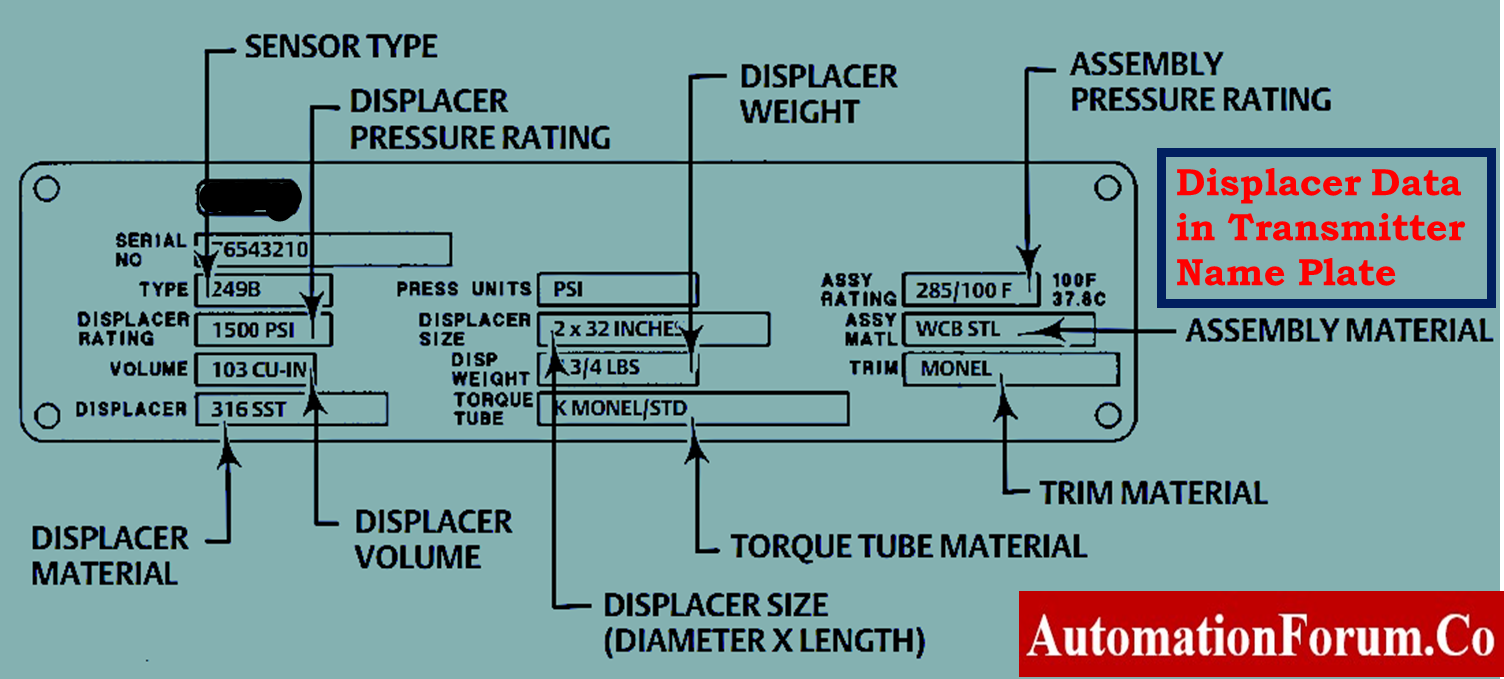
- 数据已事先记录到仪器存储器中,HART通信可用于读取位移器的实际体积和重量。
- 否则,牢固的板上标有位移器的真实重量,可以通过称重来确定位移器的重量。
- 求解以下方程,得到顶替杆悬浮的总重量,以模拟特定的液位或比重条件:
- 位移器的实际体积和重量可以通过HART通信读取(如果数据之前已经保存到仪器存储器中)。否则,铭牌上标有位移器的实际体积,并可通过称重来测量位移器的重量。
单一液体应用

零位校正
- 要进行零点校准,将一组等于实际位移器重量的重量附加到扭矩臂上,以模拟低电平。
- 输入并验证ZERO校准,确保显示器上显示的值等于0.0%。如果不是,再次重复该过程,直到值非常接近此值为止。
零校准重量(LRV) =顶替器的实际重量。
量程校正
- 在扭矩臂上附加一组砝码,该砝码等于位移器完全淹没在校准流体中时的表观重量,具有校准比重。
- 表观权重(URV)计算如下。
重量损失(URV) =驱油器重量-浸在液体中的驱油器重量
驱替剂液体减重=驱替剂实际体积×液体SG
顶替剂实际体积V =πr2h
R =位移器的半径。
H =驱油器高度。
量程校准的位移器表观重量=位移器实际重量-(位移器实际体积X液体SG)
量程校准重量(URV) =驱油器的实际重量-液体失重
- 要进行跨度校准,将一组等于位移器计算出的表观重量的重量附加到扭矩臂上,以模拟高电平。
- 输入并验证SPAN校准,确保显示器上显示的值等于100%。如果不是,再次重复该过程,直到值非常接近此值为止。
接口级应用:
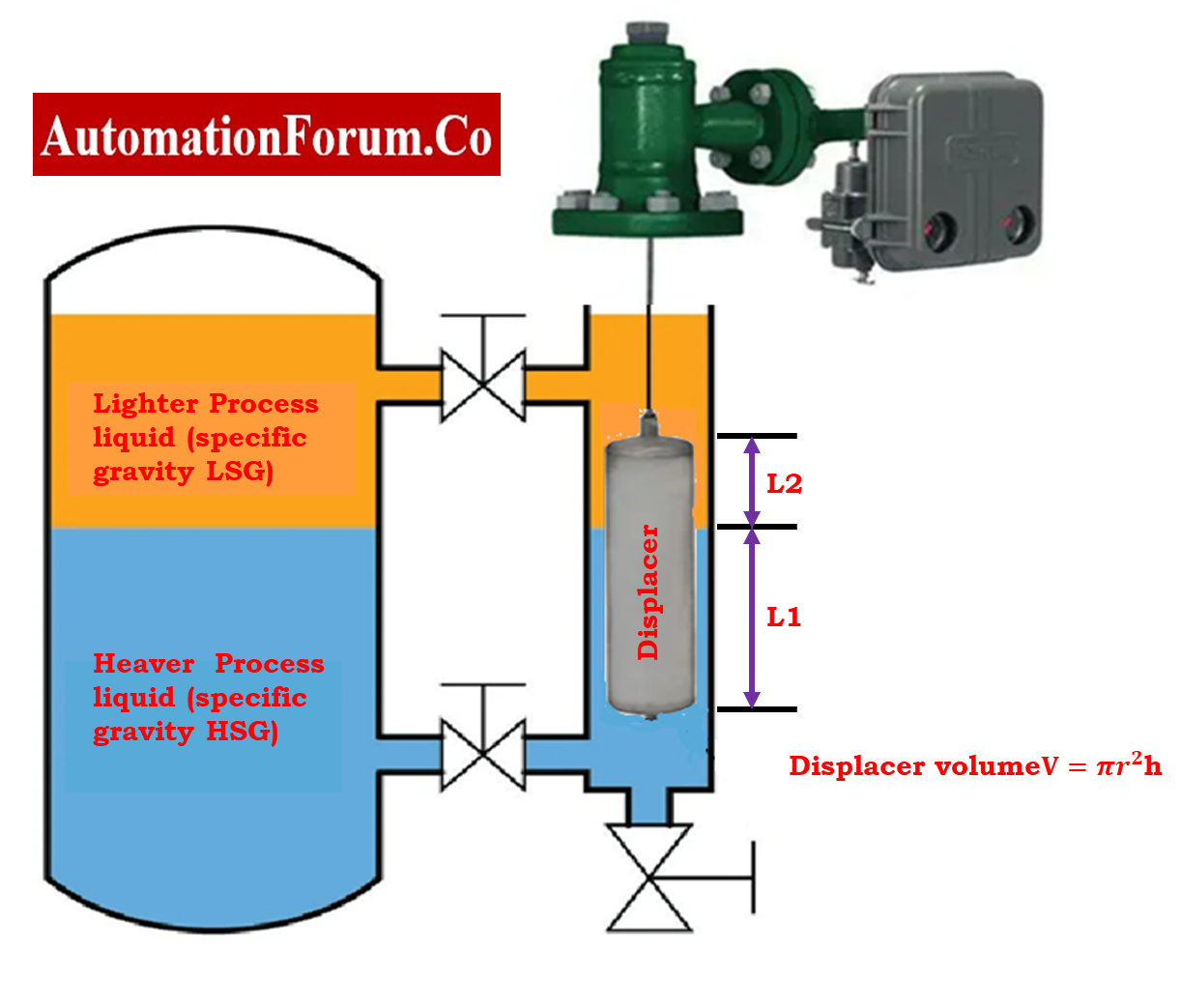
零位校正
- 使用下面的公式在扭矩臂上附加一组重量,当完全淹没在用于校准的比重较轻的液体(LSG)时,这些重量等于位移器重量:
在接口应用中用于零点校准的位移器表观重量=
顶替剂实际重量-(顶替剂实际体积X LSG液体比重)
零校准重量(LRV) =顶替器的实际重量- LSG液体的减重
- 输入并验证ZERO校准,确保显示器上显示的值等于0.0%。如果不是,再次重复该过程,直到值非常接近此值为止。
量程校正
- 使用下面的公式在扭矩臂上附加一组重量,当完全淹没在用于校准的更高比重的液体(HSG CALIB)时,这些重量等于位移器重量:
- 表观权重(URV)计算如下。
重量损失(URV) =顶替剂重量-顶替剂浸在HSG液中的重量
HSG液体对顶替剂的减重=顶替剂实际体积× HSG液体的SG
顶替剂实际体积V =πr2h
R =位移器的半径。
H =驱油器高度。
用于量程校准的顶替剂表观重量=顶替剂实际重量-(顶替剂实际体积X SG的HSG液体)
量程校准重量=位移器实际重量- HSG液体减重
- 要进行量程校准,请将一组等于位移器计算出的表观重量的重量附加到扭矩臂上,以模拟高水平。
- 输入并验证SPAN校准,确保显示器上显示的值等于100%。如果不是,再次重复该过程,直到值非常接近此值为止。
校准公式
适用于单一液体应用
| 零标定重量=位移器的实际重量 液体驱替剂减重=驱替剂实际体积X液体驱替剂实际体积SGV =πr2hR =驱油器半径h =驱油器高度 量程校准重量=驱油器实际重量-驱油器液体减重 |
|---|
接口级应用
| 在接口应用中用于零位校准的顶替剂表观重量=顶替剂实际重量-(顶替剂实际体积X LSG液体比重)顶替剂实际体积V =πr2hR =驱油器半径h =驱油器高度 零校正重量=位移器的实际重量- LSG液体的减重 HSG液体对顶替剂的减重=顶替剂实际体积× HSG液体的SG 用于量程校准的顶替剂表观重量=顶替剂实际重量-(顶替剂实际体积X SG的HSG液体) 量程校准重量=顶替剂的实际重量-顶替剂经HSG液体减重 |
|---|
例子——校准
单液体(水)应用重量计算
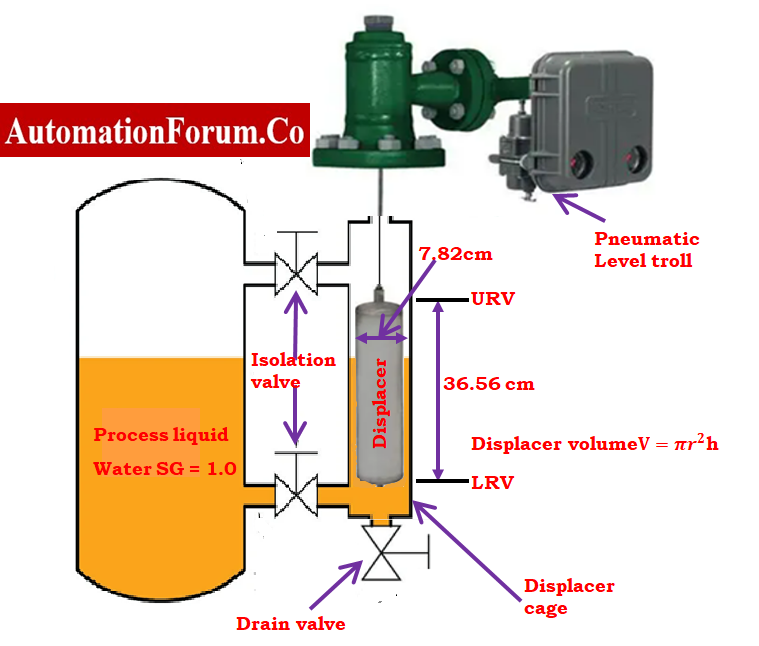
置换液和工艺液数据:
- W=位移器重量2500克
- 顶替器直径为7.820 cm
- 位移器长度为36.56厘米
- 工艺液体为水
- 工艺液体比重。(水)= 1.0
V =驱替剂体积。
所以,位移器的半径r = 7.82/2 = 3.91厘米
位移器实际体积V=πr2h
体积V = 3.14 × r²× h
= 3.14 × 3.91 × 3.91 × 36.56 = 1,755.049
零位校正:
- 对于零百分比校准,在扭矩管臂杆上附加一个位移器或2500克重量。
- 调整零点输出信号为4 mA / 3psi(气动水平喷子)。
量程校正:
- 100%校准时,附加重量=位移器重量-{体积X液体(水)比重}
= 2500 - 1755.05 × 1
= 2500 - 1755.05
= 744.95克
- 调整跨度输出信号20mA /15psi(气动水平喷子)。
| 水平(%) | 附加重量(克) | 发射机输出功率(mA) | 发射器o/p (psi) |
|---|---|---|---|
| 0 | 2500 | 4 | 3. |
| 25 | 2061 | 8 | 6 |
| 50 | 1623 | 12 | 9 |
| 75 | 1184 | 16 | 12 |
| One hundred. | 745 | 20. | 15 |
为了检查线性度,每25%的步骤增加重量438.8克
= 1755/4
= 438.8克
- 通过两次或三次校准来检查发射机的重复性。
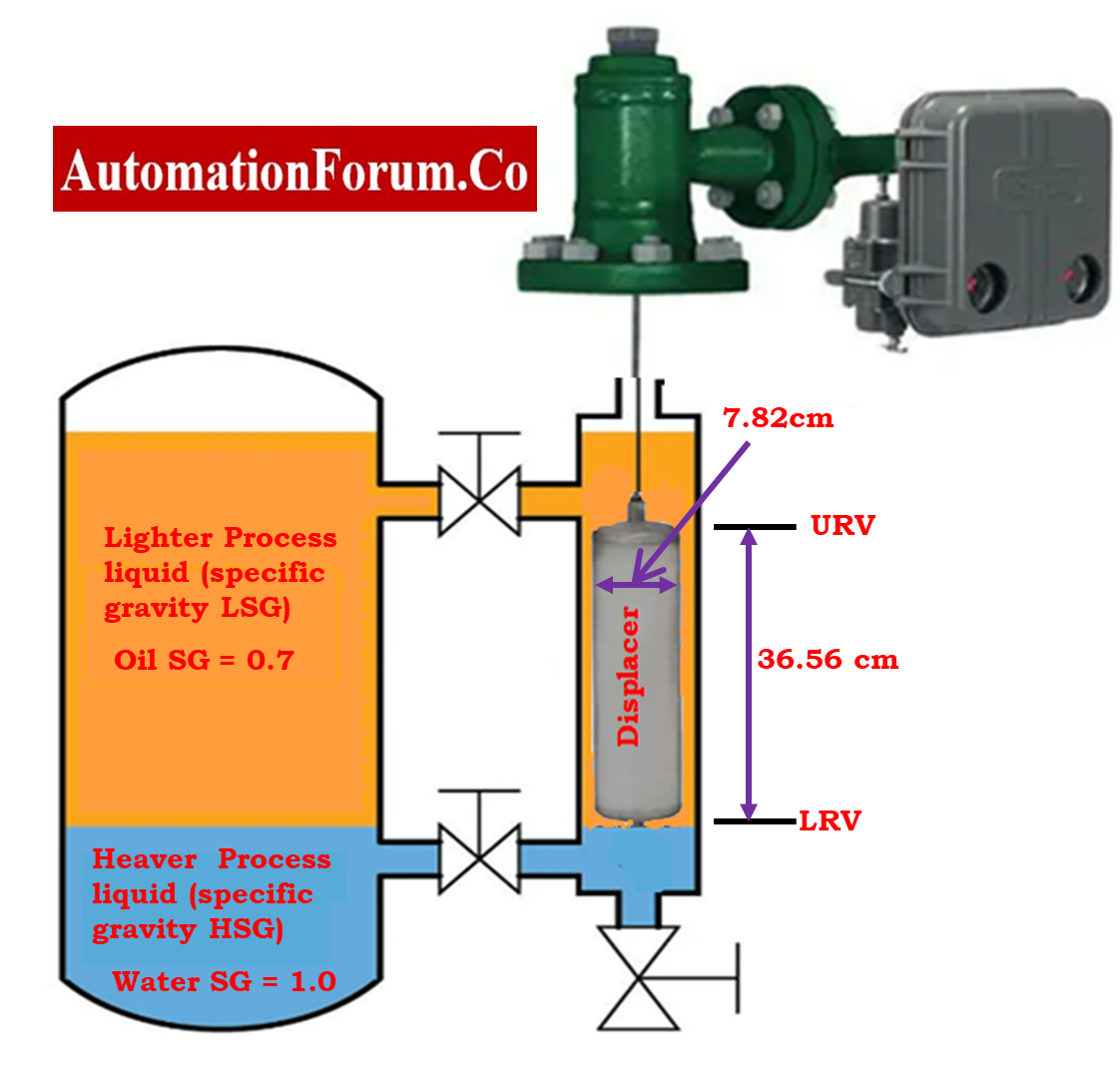
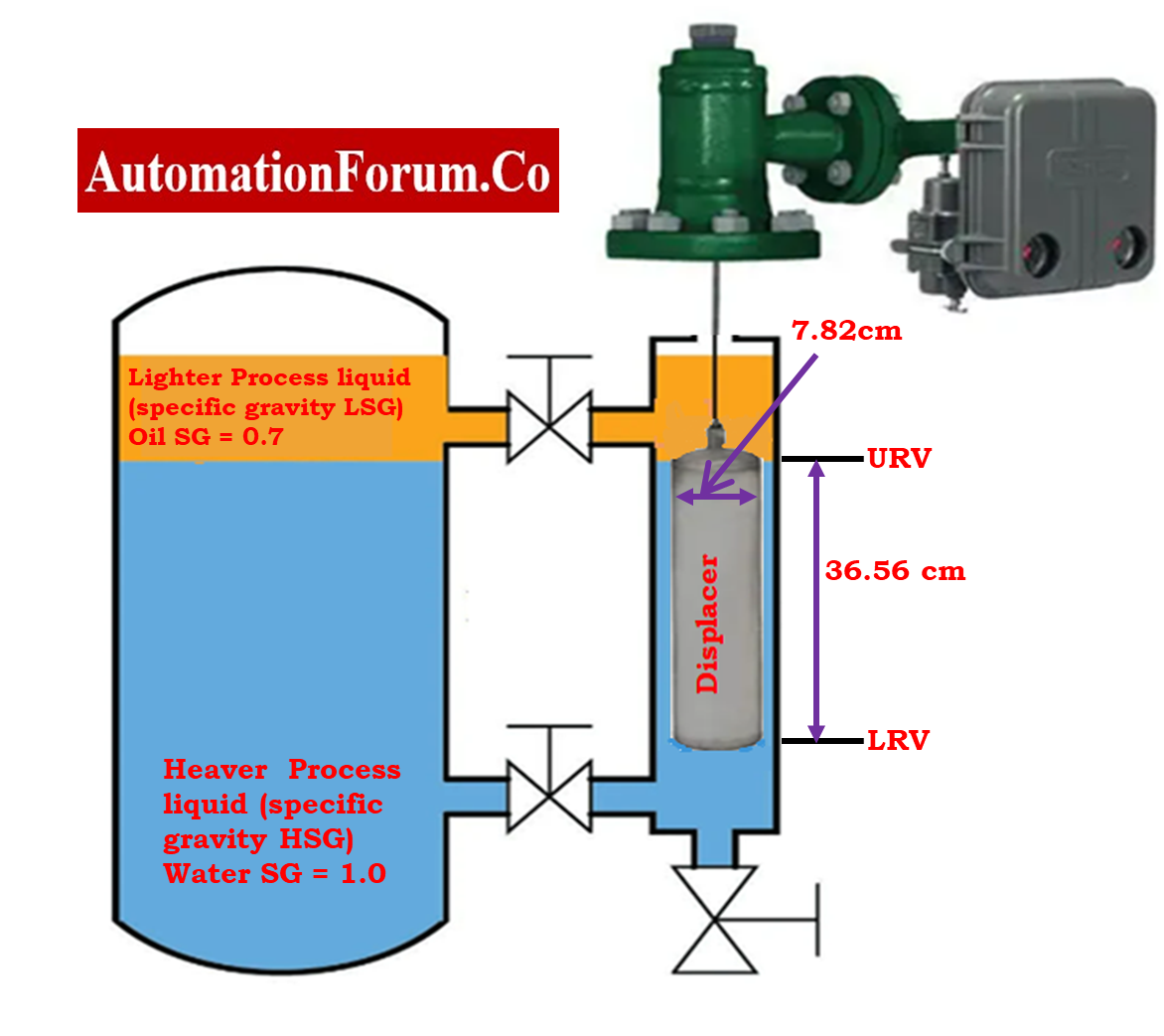
权重计算与接口级应用程序
驱油器和工艺液体数据:
- W=位移器重量2500克
- 顶替器直径为7.820 cm
- 位移器长度为36.56厘米
- 工艺液体为水和油。
- 低比重工艺液(油)比重= 0.7
- 比重较高的工艺液(水)比重= 1.0
V =驱替剂体积。
所以位移器的半径r = 7.82/2 = 3.91厘米
位移器实际体积V=πr2h
体积V = 3.14 × r²× h
= 3.14 × 3.91 × 3.91 × 36.56 = 1,755.049
零位校正:
LRV接口级别状态
- 为零百分比校准附加重量=位移器重量-{体积X较轻工艺液(水)比重}
= 2500 - (1755.05 x 0.7)
= 2500 - 1228.5
= 1271.5克
- 调整零点输出信号为4mA / 3psi(气动水平喷子)。
量程校准:
URV接口级别条件
- 为One hundred.百分比校准附加重量=位移器重量-{体积X较高比重工艺液(水)}
= 2500 - (1755.05 x 1)
= 2500 - 1755.05
= 744.95克
- 调整跨度输出信号20mA / 15psi(气动水平喷子)。
- 通过两次或三次校准来检查发射机的重复性。
- 线性检验权重值计算如下
实际跨度重量=高比重液体驱油剂减重-低比重液体驱油剂减重。
= 1755 - 1228
= 527克
每25%
527 ÷ 4=131.7克
在线性度测试中,每增加25%的步骤,重量增加131.7克。
| 水平(%) | 附加重量(克) | 用于电子变送器o/p (mA) | 用于气动变送器o/p (psi) |
|---|---|---|---|
| 0 | 1271.5 | 4 | 3. |
| 25 | 1140.1 | 8 | 6 |
| 50 | 1008.4 | 12 | 9 |
| 75 | 876.7 | 16 | 12 |
| One hundred. | 744.95 | 20. | 15 |
- 通过两次或三次校准来检查发射机的重复性。
校准记录
- 根据仪器量程从测试标准的上标方向和下标方向分别施加0%、25%、50%、75%和100%对应的输入。
- 如果输出值的结果不在可接受的范围内,则必须进行校准。所有输出值都在可接受的范围内(+/- %),则不需要进一步校准。
- 将结果输出值记录在空白校准报告的左栏中。
- 校准完成后,将校准标签贴在仪器上
样品校准报告
下图显示,电子水平仪的校准样本报告是使用标准测试重量作为参考。
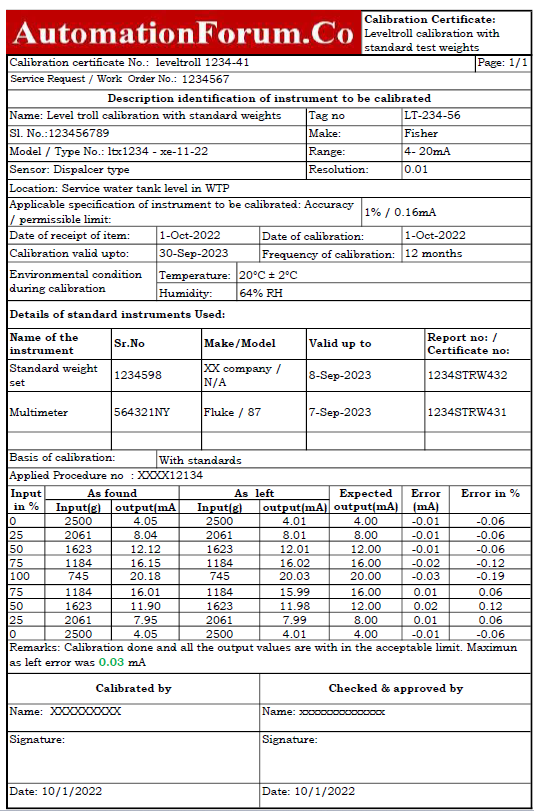
以下链接提供了对用于准备Level troll校准报告的excel模板的下载文件的访问。