PID(比例 - 积分 - 衍生物)控制器

成比例的
这成比例的术语使当前误差信号乘以增益(kp)。结果将是输出信号。
所以输出信号= kp * error_signal
不可缺少的
这不可缺少的术语使得当前误差信号值和持续时间乘以增益(ki)。
结果将是输出信号。
所以输出信号=
其中ki - 是积分增益
t是瞬间时间
e(t) - 是错误信号
信号的积分是信号已经开始的所有瞬时值的总和,只要您开始计数即可停止计数。
积分项(当添加到比例项时)加速了对设定值的过程的移动,并消除了仅比例的控制器发生的残余稳态误差。
衍生物
这衍生物术语使得更改速率误差信号乘以增益(kp)。结果将是输出信号值。
所以输出信号=
- kd是衍生利益
-e(t)是错误信号。
衍生项减慢了控制器输出的变化率,并且这种效果最接近控制器设定点。
PID控制系统
这是一个框图PID控制系统。
包括:
-Pid控制器
- 过程/工厂
-反馈
-设定点
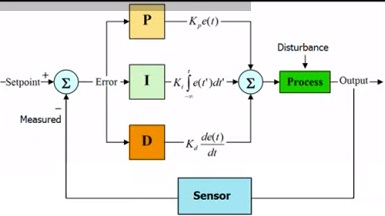
设定值是我们想要流程的值。
输出必须等于设定值,否则误差信号不会为零。
错误信号将是[设定点测量]
3增益[p,i&d]将总结在一起以输出1个信号,该信号将获得等于设定值的输出
该过程是系统的植物植物/模型。示例 - 电机
系统添加了一种干扰。示例 - 电机轴的摩擦。

从测量值中减去设定值以创建错误。
错误只是乘以一个,两个或所有计算的p,i和d动作。
然后将产生的“错误X控制操作”添加在一起并发送到控制器输出。